PyTorch class-based neural net
Contents
PyTorch class-based neural net#
In this workbook we build a neural network to predict survival. The two common frameworks used for neural networks (as of 2020) are TensorFlow and PyTorch. Both are excellent frameworks. TensorFlow frequently requires fewer lines of code, but PyTorch is more natively Python in its syntax, and also allows for easier debugging as the model may be interrupted, with a breakpoint, and debugged as necessary. This makes PyTorch particularly suitable for research and experimentation. A disadvantage of using PyTorch is that, compared with TensorFlow, there are fewer training materials and examples available.
Both TensorFlow and PyTorch allow the neural network to be trained on a GPU, which is beneficial for large neural networks (especially those processing image, sound or free-text data). In order to lever the benefits of GPU (which perform many calculations simultaneously), data is grouped into batches. These batches are presented to the CPU in a single object called a Tensor (a multi-dimensional array).
Installation instructions for PyTorch may be found at pytorch.org. (If in doubt about what installation to use, use pip install and use CPU-only, not CUDA). If you are using Anaconda then it is advised to create a new environment, and install pytorch, numpy, pandas, sci-kit learn and matplotlib into that new environment. For more on Anaconda environments see: https://docs.anaconda.com/anaconda/navigator/tutorials/manage-environments/
There are two versions of this workbook. This version uses a class-based method which offers some more flexibility (but at the cost of a little simplicity). The alternative version uses simpler form but at the cost of some flexibility. It is recommended to work through both methods.
It is not the intention here to describe neural networks in any detail, but rather give some introductory code to using a neural network for a classification problem. For an introduction to neural networks see: https://en.wikipedia.org/wiki/Artificial_neural_network
The code for PyTorch here keeps all calculations on the CPU rather than passing to a GPU (if you have one). Running neural networks on CPUs is fine for small amounts of structured data such as our Titanic data. GPUs come in to their own for large sets of data or unstructured data like images, sound clips, or free text.
The training process of a neural network consists of three general phases which are repeated across all the data. All of the data is passed through the network multiple times (the number of iterations, which may be as few as 3-5 or may be 100+). The three phases are:
Pass training X data to the network and predict y
Calculate the ‘loss’ (error) between the predicted and observed (actual) values of y
Adjust the network a little (as defined by the learning rate) so that the error is reduced. The correction of the network is performed by PyTorch or TensorFlow using a technique called ‘back-propagation’.
The learning is repeated until maximum accuracy is achieved (but keep an eye on accuracy of test data as well as training data as the network may develop significant over-fitting to training data unless steps are taken to offset the potential for over-fitting, such as use of ‘drop-out’ layers described below).
Note: Neural Networks are most often used for complex unstructured data. For structured data, other techniques, such as Random Forest,s may frequently be preferred.
Load modules#
import numpy as np
import pandas as pd
# sklearn for pre-processing
from sklearn.preprocessing import MinMaxScaler
from sklearn.model_selection import StratifiedKFold
from sklearn.utils import shuffle
# pytorch
import torch
from torch.autograd import Variable
import torch.nn.functional as F
Download data if not previously downloaded#
download_required = True
if download_required:
# Download processed data:
address = 'https://raw.githubusercontent.com/MichaelAllen1966/' + \
'1804_python_healthcare/master/titanic/data/processed_data.csv'
data = pd.read_csv(address)
# Make all data 'float' type
data = data.astype(float)
# Create a data subfolder if one does not already exist
import os
data_directory ='./data/'
if not os.path.exists(data_directory):
os.makedirs(data_directory)
# Save data
data.to_csv(data_directory + 'processed_data.csv', index=False)
Define function to scale data#
In neural networks it is common to to scale input data 0-1 rather than use standardisation (subtracting mean and dividing by standard deviation) of each feature).
def scale_data(X_train, X_test):
"""Scale data 0-1 based on min and max in training set"""
# Initialise a new scaling object for normalising input data
sc = MinMaxScaler()
# Set up the scaler just on the training set
sc.fit(X_train)
# Apply the scaler to the training and test sets
train_sc = sc.transform(X_train)
test_sc = sc.transform(X_test)
return train_sc, test_sc
Load data#
data = pd.read_csv('data/processed_data.csv')
data.drop('PassengerId', inplace=True, axis=1)
X = data.drop('Survived',axis=1) # X = all 'data' except the 'survived' column
y = data['Survived'] # y = 'survived' column from 'data'
# Convert to NumPy as required for k-fold splits
X_np = X.values
y_np = y.values
Set up neural net#
Here we use the class-based method to set up a PyTorch neural network. The network is the same as the sequential network we previously used, but is built using
We will put construction of the neural net into a separate function.
The neural net is a relatively simple network. The inputs are connected to two hidden layers (of 240 and 50 nodes) before being connected to two output nodes corresponding to each class (died and survived). It also contains some useful additions (batch normalisation and dropout) as described below.
The layers of the network are:
An input layer (which does not need to be explicitly defined when using the
Sequentialmethod)A linear fully-connected (dense) layer.This is defined by the number of inputs (the number of input features) and the number of nodes/outputs. Each node will receive the values of all the inputs (which will either be the feature data for the input layer, or the outputs from the previous layer - so that if the previous layer had 10 nodes, then each node of the current layer would have 10 inputs, one from each node of the previous layer). It is a linear layer because the output of the node at this point is a linear function of the dot product of the weights and input values. We will expand out feature data set up to twice the number of input features.
A batch normalisation layer. This is not usually used for small models, but can increase the speed of training and stability for larger models. It is added here as an example of how to include it (in large models all dense layers would be followed by a batch normalisation layer). Using batch normalisation usually allows for a higher learning rate. The layer definition includes the number of inputs to normalise.
A dropout layer. This layer randomly sets outputs from the preceding layer to zero during training (a different set of outputs is zeroed for each training iteration). This helps prevent over-fitting of the model to the training data. Typically between 0.1 and 0.5 outputs are set to zero (
p=0.1means 10% of outputs are set to zero).An activation layer. In this case ReLU (rectified linear unit). ReLU activation is most common for the inner layers of a neural network. Negative input values are set to zero. Positive input values are left unchanged.
A second linear fully connected layer (again twice the number of input features). This is again followed by batch normalisation, dropout and ReLU activation layers.
A final fully connected linear layer of a single node.
Apply sigmoid activation to convert the output node to range 0-1 output.
The output of the net are two numbers (corresponding to scored for died/survived) between 0 and 1. These do not necessarily add up exactly to one (if Sigmoid is replaced with SoftMax then they will add up to 1, but here we will stick to sigmoid). The one with the highest value is taken as the classification result. This structure of neural net allows for any number of classes (e.g 10 classes for digit recognition).
Set up neural net#
class Net(torch.nn.Module):
def __init__(self, number_features):
# Define layers
super(Net, self).__init__()
self.fc1 = torch.nn.Linear(number_features, number_features * 2)
self.bn1 = torch.nn.BatchNorm1d(number_features * 2)
self.fc2 = torch.nn.Linear(number_features * 2, number_features * 2)
self.bn2 = torch.nn.BatchNorm1d(number_features * 2)
self.fc3 = torch.nn.Linear(number_features * 2, 1)
def forward(self, x):
# Define sequence of layers
x = self.fc1(x) # Fully connected layer
x = self.bn1(x) # Batch normalisation
x = F.dropout(x, p=0.3) # Apply dropout
x = F.relu(x) # ReLU activation
x = self.fc2(x) # Fully connected layer
x = self.bn2(x) # Batch normalisation
x = F.dropout(x, p=0.3) # Apply dropout
x = F.relu(x) # ReLU activation
x = self.fc3(x) # Fully connected layer
x = torch.sigmoid(x) # Sigmoid output (0-1)
return x
Run the model with k-fold validation#
# Set up lists to hold results
training_acc_results = []
test_acc_results = []
# Set up splits
skf = StratifiedKFold(n_splits = 5)
skf.get_n_splits(X, y)
# Loop through the k-fold splits
k_counter = 0
for train_index, test_index in skf.split(X_np, y_np):
k_counter +=1
print(f'K_fold {k_counter}:',end=' ')
# Get X and Y train/test
X_train, X_test = X_np[train_index], X_np[test_index]
y_train, y_test = y_np[train_index], y_np[test_index]
# Scale X data
X_train_sc, X_test_sc = scale_data(X_train, X_test)
# Define network
number_features = X_train_sc.shape[1]
net = Net(number_features)
# Set batch size (cases per batch - commonly 8-64)
batch_size = 16
# Epochs (number of times to pass over data)
num_epochs = 200
# Learning rate (how much each bacth updates the model)
learning_rate = 0.003
# Calculate numebr of batches
batch_no = len(X_train_sc) // batch_size
# Set up optimizer for classification
criterion = torch.nn.BCELoss()
optimizer = torch.optim.Adam(net.parameters(), lr=learning_rate)
# Set net to training mode
net.train()
# Train model by passing through the data the required number of epochs
for epoch in range(num_epochs):
# Shuffle the training data
X_train_sc, y_train = shuffle(X_train_sc, y_train)
for i in range(batch_no):
# Get X and y batch data
start = i * batch_size
end = start + batch_size
x_var = Variable(torch.FloatTensor(X_train_sc[start:end]))
y_var = Variable(torch.FloatTensor(y_train[start:end]))
# These steps train the model: Forward + Backward + Optimize
optimizer.zero_grad() # reset optimizer
ypred_var = net(x_var) # predict y
loss = criterion(ypred_var, y_var.reshape(-1,1)) # Calculate loss
loss.backward() # Back propagate loss through network
optimizer.step() # Update network to reduce loss
### Test model (print results for each k-fold iteration)
# Set net to evaluation mode
net.eval()
# Get training accuracy
test_var = Variable(torch.FloatTensor(X_train_sc))
result = net(test_var)
values = result.data.numpy().flatten()
y_pred_train = values >= 0.5
accuracy_train = np.mean(y_pred_train == y_train)
training_acc_results.append(accuracy_train)
# Get test accuracy
test_var = Variable(torch.FloatTensor(X_test_sc))
result = net(test_var)
values = result.data.numpy().flatten()
y_pred_test = values >= 0.5
accuracy_test = np.mean(y_pred_test == y_test)
print(f'{accuracy_test:0.3}')
test_acc_results.append(accuracy_test)
K_fold 1: 0.777
K_fold 2: 0.798
K_fold 3: 0.854
K_fold 4: 0.775
K_fold 5: 0.837
Show training and test results#
# Show individual accuracies on training data
training_acc_results
[0.8778089887640449,
0.8877980364656382,
0.85273492286115,
0.8709677419354839,
0.8653576437587658]
# Show individual accuracies on test data
test_acc_results
[0.776536312849162,
0.797752808988764,
0.8539325842696629,
0.7752808988764045,
0.8370786516853933]
# Get mean results
mean_training = np.mean(training_acc_results)
mean_test = np.mean(test_acc_results)
# Display each to three decimal places
print (f'{mean_training:0.3f}, {mean_test:0.3f}')
0.871, 0.808
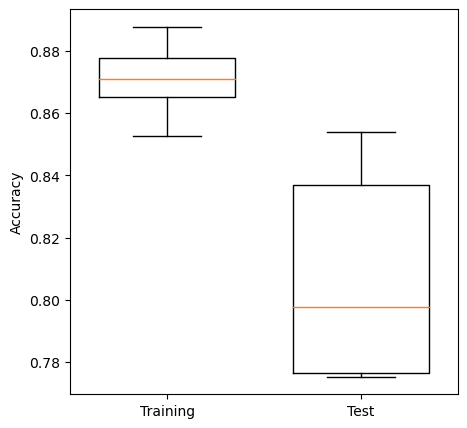
Plot results: Box Plot#
Box plots show median (orange line), the second and third quartiles (the box), the range (excluding outliers), and any outliers as ‘whisker’ points. Outliers, by convention, are considered to be any points outside of the quartiles +/- 1.5 times the interquartile range. The limit for outliers may be changed using the optional whis argument in the boxplot.
Medians tend to be an easy reliable guide to the centre of a distribution (i.e. look at the medians to see whether a fit is improving or not, but also look at the box plot to see how much variability there is).
Test sets tend to be more variable in their accuracy measures. Can you think why?
import matplotlib.pyplot as plt
%matplotlib inline
# Set up X data
x_for_box = [training_acc_results, test_acc_results]
# Set up X labels
labels = ['Training', 'Test']
# Set up figure
fig = plt.figure(figsize=(5,5))
# Add subplot (can be used to define multiple plots in same figure)
ax1 = fig.add_subplot(111)
# Define Box Plot (`widths` is optional)
ax1.boxplot(x_for_box,
widths=0.7,
whis=10)
# Set X and Y labels
ax1.set_xticklabels(labels)
ax1.set_ylabel('Accuracy')
# Show plot
plt.show()